A looooong one this time, so straight to the point! First, we'll discuss the Linux processes trivia and then review the following scenarios, as usually, with some code examples:
- awaiting a child process termination;
- awaiting a grandchild process termination;
- catching the parent process termination.
Level up your server-side game — join 20,000 engineers getting insightful learning materials straight to their inbox.
Linux processes basics
First and foremost, every process in Linux has an ID, so-called PID. Whenever we create a new process via fork() [or clone()] system call, a next spare PID is assigned to it by the kernel. The process that makes the fork() call becomes a parent of the newly created process and its PID becomes a parent process id, i.e. PPID of the child process. This procedure is respected for all the processes in the system, starting from the very first one (i.e. init process with PID 1). Thus, processes in Linux form a tree-like structure where at any given time, a process always has a single parent process (ancestor) and can have from 0 to N child processes (descendants):
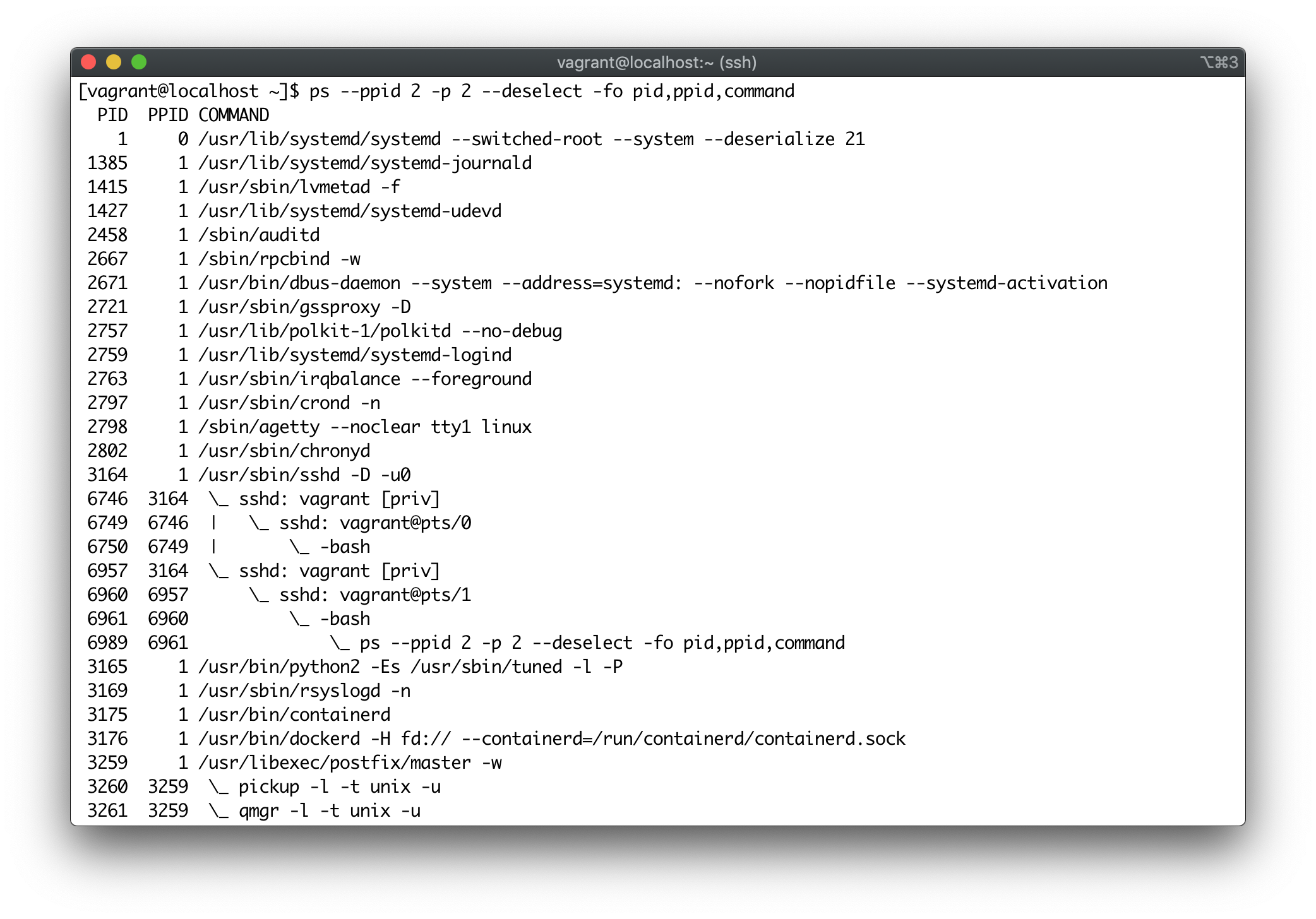
On the screenshot above there is an output of ps --ppid 2 -p 2 --deselect -fo pid,ppid,command showing the current state of the process tree on a Centos 7 machine. The init process, as it usually happens in modern Linux distributions, is implemented by systemd. Also, I intentionally used --ppid 2 -p 2 --deselect to prevent spoiling the results with the numerous kernel threads spawned by the process with PID 2. Notice, the branches started by sshd daemon with PID 3164. The daemon itself has been started by the init process with PID 1. In turn, it spawned two subprocesses 6746 and 6957 for the two ongoing ssh sessions to this server. And these sessions in their turns spawned bash shells with PIDs 6750 and 6961.
Awaiting a child process termination
First of all, why do we need to wait? Well, sometimes the parent process is just interested in the child termination event. The famous example is a worker pool pattern utilized by Nginx, PHP-FPM, uWSGI, and others. The main process has to maintain a fixed-size pool of sub-processes, while the processes in the pool will be doing the actual payload. Occasionally, workers die, and the main process has to spawn more processes in response to keep the pool size unaltered. For this and similar situations, the Linux kernel provides a family of wait() system calls to await the child process termination. However, due to the way, the reporting of the child exit status back to the parent is implemented, even careless parents have to explicitly await their children terminations. Otherwise, a zombie apocalypse begins.
When a process forks itself, the execution of the created child process happens independently (we will leave process groups and job control out of the scope of this article) and concurrently with the parent's execution. Even though the new process is still parented to the original process, by default its execution is not synchronized with it. Since the Linux kernel has to always provide a way to report the child exit status (and some usage stats, like spent CPU cycles, number of page faults, etc) back to its parent, the kernel needs to keep a tiny bit of information about every process in system memory even after its exit. This information gets cleaned up only when it has been explicitly read by the corresponding parent process. From the process termination and until its status has been read by the parent via wait() call, the process stays in defunct or zombie state. Zombie processes keep system resources, such as memory or process ids, consumed and that eventually leads to the denial of service.
Hopefully, I convinced you that the process' awaiting is of paramount importance. Now, let’s get our hands dirty with some code!
Disclaimer on the programming language choice.
The single most important thing while learning a platform (Linux kernel in this case) is to ensure that the observed behavior is not spoiled by any intermediary components. A lot of modern programming languages (the most prominent example would be Go) possess extensive runtimes with significant auxiliary logic written on top of the OS core functionality to provide a unified programming experience for different platforms (Linux, BSD, macOS, Windows, etc). And for our Linux processes journey, the language is such an intermediary component. Thus, the most reasonable choice would be obviously C. There is little to no extra logic (i.e. language runtime) in between C standard library and the Linux system calls. Thus, the language doesn't spoil the original system's behavior. However, Rust is claimed to be a new C. So, let's check it out! But we have to be careful because Rust does have higher-level abstractions to deal with processes as well. Instead, we'll be using raw bindings to libc [luckily provided by the core team, but unfortunately unsafe], and a [luckily] shallow [but unfortunately] third-party wrapper around Unix-specific part of libc called nix, that makes the calls great safe again. The full version of the source code in the article can be found on my GitHub.
use std::process::exit;
use std::thread::sleep;
use std::time::Duration;
use nix::sys::wait::waitpid;
use nix::unistd::{fork, getpid, getppid, ForkResult};
fn main() {
println!("[main] Hi there! My PID is {}.", getpid());
let child_pid = match fork() {
Ok(ForkResult::Child) => {
//////////////////////
// child //
//////////////////////
println!(
"[child] I'm alive! My PID is {} and PPID is {}.",
getpid(),
getppid()
);
println!("[child] I'm gonna sleep for a while and then just exit...");
sleep(Duration::from_secs(2));
exit(0);
}
Ok(ForkResult::Parent { child, .. }) => {
println!("[main] I forked a child with PID {}.", child);
child
}
Err(err) => {
panic!("[main] fork() failed: {}", err);
}
};
println!("[main] I'll be waiting for the child termination...");
match waitpid(child_pid, None) {
Ok(status) => println!("[main] Child exited with status {:?}", status),
Err(err) => panic!("[main] waitpid() failed: {}", err),
}
println!("[main] Bye Bye!");
}
Run the full version using cargo run --bin wait_block.
The idea behind the snipped above is hell simple. The execution starts from the main process which reports its PID and immediately creates a child process by forking itself. The child process, in turn, reports its PID and PPID, but then falls asleep before the termination. However, the execution of the parent process continues to the next line after the fork() call regardless of the child's behavior. Thus, the main process uses waitpid() call to pause itself until the child's exit status will be available:
[main] Hi there! My PID is 7231.
[main] I forked a child with PID 7264.
[child] I'm alive! My PID is 7264 and PPID is 7231.
[main] I'll be waiting for the child termination...
[child] I'm gonna sleep for a while and then just exit...
[main] Child exited with status Exited(Pid(7264), 0)
[main] Bye Bye!
By default, waitpid() call blocks the caller, but a non-blocking behavior is achievable via specifying WNOHANG flag in the second argument.
The wait() system call is much less flexible. It doesn't allow to specify the PID of the awaited process and always suspends the execution of the caller process. The first terminated child (assuming there are some) will resume the execution of the parent process. There are obsolete alternatives like wait3() and wait4() trying to enrich wait() behavior, but nowadays waitpid() is the preferred method.
Last but not least, what if we want to know when the child process terminates but at the same time we don't want to block the parent process? The parent process may have its own things to be done in parallel with awaiting the child. One solution could be to use a busy loop, something like:
fn main() {
println!("[main] Hi there! My PID is {}.", getpid());
// ... do the fork() stuff
println!("[main] I'll be doing my own stuff while waiting for the child termination...");
loop {
match waitpid(child_pid, Some(WaitPidFlag::WNOHANG)) {
Ok(WaitStatus::StillAlive) => {
println!("[main] Child is still alive, do my own stuff while waiting.");
// ... replace sleep with the payload
sleep(Duration::from_millis(500));
}
Ok(status) => {
println!("[main] Child exited with status {:?}.", status);
break;
}
Err(err) => panic!("[main] waitpid() failed: {}", err),
}
}
println!("[main] Bye Bye!");
}
Run the full version using cargo run --bin wait_busy.
While legit, this is not the most efficient way to solve the problem. A much more flexible solution is based on Linux signals - an asynchronous IPC mechanism. When a child process gets terminated the kernel sends a SIGCHLD signal to the parent process. By default, there is no action assigned for this kind of signals, so parents just ignore them, but we can set up a custom SIGCHLD handler:
UPDATED: thanks to redditor u/jschievink for pointing out that Rust standard library functions aren't async-signal-safe. This is a nice pitfall people should be aware of when choosing not C for their system programming projects. Unix signals are ancients asynchronous creatures interrupting your program at any arbitrarily bad time. Working properly with signals is very tricky even in pure C since even primitive synchronization and memory allocation is not safe in signal handler code. Luckily, our examples are rather simplistic and libc write() and waitpid() are in the async-signal-safe list.
Original and incorrect version of the code.
use std::process::exit;
use std::thread::sleep;
use std::time::Duration;
use nix::sys::signal::{sigaction, SaFlags, SigAction, SigHandler, SigSet, SIGCHLD};
use nix::sys::wait::waitpid;
use nix::unistd::{fork, getpid, getppid, ForkResult, Pid};
extern "C" fn handle_sigchld(_: libc::c_int) {
println!("[main] What a surprise! Got SIGCHLD!");
match waitpid(Pid::from_raw(-1), None) {
Ok(status) => println!("[main] Child exited with status {:?}", status),
Err(err) => panic!("[main] waitpid() failed: {}", err),
}
println!("[main] Bye Bye!");
exit(0);
}
fn main() {
println!("[main] Hi there! My PID is {}.", getpid());
match fork() {
Ok(ForkResult::Child) => {
//////////////////////
// child //
//////////////////////
println!(
"[child] I'm alive! My PID is {} and PPID is {}.",
getpid(),
getppid()
);
println!("[child] I'm gonna sleep for a while and then just exit...");
sleep(Duration::from_secs(2));
exit(0);
}
Ok(ForkResult::Parent { child, .. }) => {
println!("[main] I forked a child with PID {}.", child);
}
Err(err) => {
panic!("[main] fork() failed: {}", err);
}
};
let sig_action = SigAction::new(
SigHandler::Handler(handle_sigchld),
SaFlags::empty(),
SigSet::empty(),
);
if let Err(err) = unsafe { sigaction(SIGCHLD, &sig_action) } {
panic!("[main] sigaction() failed: {}", err);
};
println!("[main] I'll be doing my own stuff...");
loop {
println!("[main] Do my own stuff.");
// ... replace sleep with the payload
sleep(Duration::from_millis(500));
}
}
use libc::{_exit, STDOUT_FILENO, write};
// ...
extern "C" fn handle_sigchld(_: libc::c_int) {
print_signal_safe("[main] What a surprise! Got SIGCHLD!\n");
match waitpid(Pid::from_raw(-1), None) {
Ok(_) => {
print_signal_safe("[main] Child exited.\n");
print_signal_safe("[main] Bye Bye!\n");
exit_signal_safe(0);
}
Err(_) => {
print_signal_safe("[main] waitpid() failed.\n");
exit_signal_safe(1);
}
}
}
fn main() {
println!("[main] Hi there! My PID is {}.", getpid());
// ... do the fork() stuff
let sig_action = SigAction::new(
SigHandler::Handler(handle_sigchld),
SaFlags::empty(),
SigSet::empty(),
);
if let Err(err) = unsafe { sigaction(SIGCHLD, &sig_action) } {
panic!("[main] sigaction() failed: {}", err);
};
println!("[main] I'll be doing my own stuff...");
loop {
println!("[main] Do my own stuff.");
// ... replace sleep with the payload
sleep(Duration::from_millis(500));
}
}
fn print_signal_safe(s: &str) {
unsafe {
write(STDOUT_FILENO, s.as_ptr() as (* const c_void), s.len());
}
}
fn exit_signal_safe(status: i32) {
unsafe {
_exit(status);
}
}
Run the full version using cargo run --bin wait_signal.
The program from above produces the following output:
[main] Hi there! My PID is 7134.
[main] I forked a child with PID 7136.
[child] I'm alive! My PID is 7136 and PPID is 7134.
[child] I'm gonna sleep for a while and then just exit...
[main] I'll be doing my own stuff...
[main] Do my own stuff.
[main] Do my own stuff.
[main] Do my own stuff.
[main] Do my own stuff.
[main] What a surprise! Got SIGCHLD!
[main] Child exited.
[main] Bye Bye!
Awaiting a grandchild process termination
Ok, here is a tricky one. We already know that every process has to wait for its children's termination to prevent the zombie apocalypse. But what happens if we forked a child process, which in turn forked another process and then suddenly died. Huh, seems like we have a grandchild now. But it can easily be, that we haven't even heard about our grandchild. So, what is the grandchild's parent id after its actual parent death? And who is going to await this apparently abandoned process?
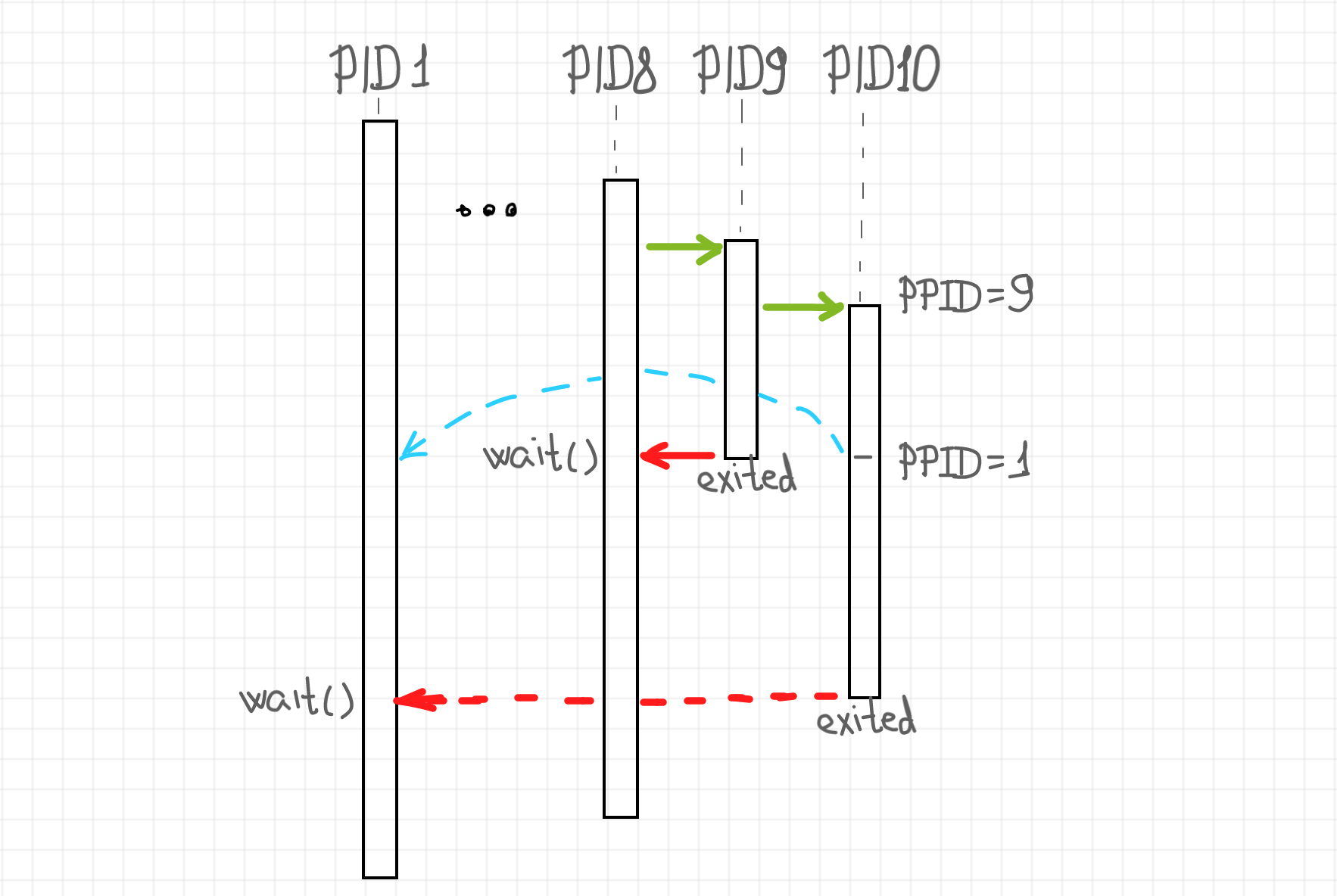
Right, the PID 1! Linux doesn't allow orphan processes. Historically, in situations similar to the described above, the grandchild processes would be reparented to the init process, the ancestor of all the processes. Although it’s not necessarily the case starting from the Linux 3.4 kernel, we will get back to it in a minute.
Now, let's make the problem even more interesting. What if our main process wants to catch the termination event of the grandchild? One real-world example of such a situation would be a supervisor-alike program trying to start and keep track of another program that daemonizes itself using the double fork trick.
The double fork technique is an ancient way of daemonization based on the reparenting to PID 1 behavior. With a rise of supervisory programs like supervisor or systemd, it's getting less and less popular, however, the supervisors need to deal with the legacy software as well. Luckily, starting from the kernel version 3.4 there is a way to solve the problem!
To prevent the reparenting of the orphan process to the init process, we need to mark one of its more close ancestors (for instance, our main process) as a subreaper!
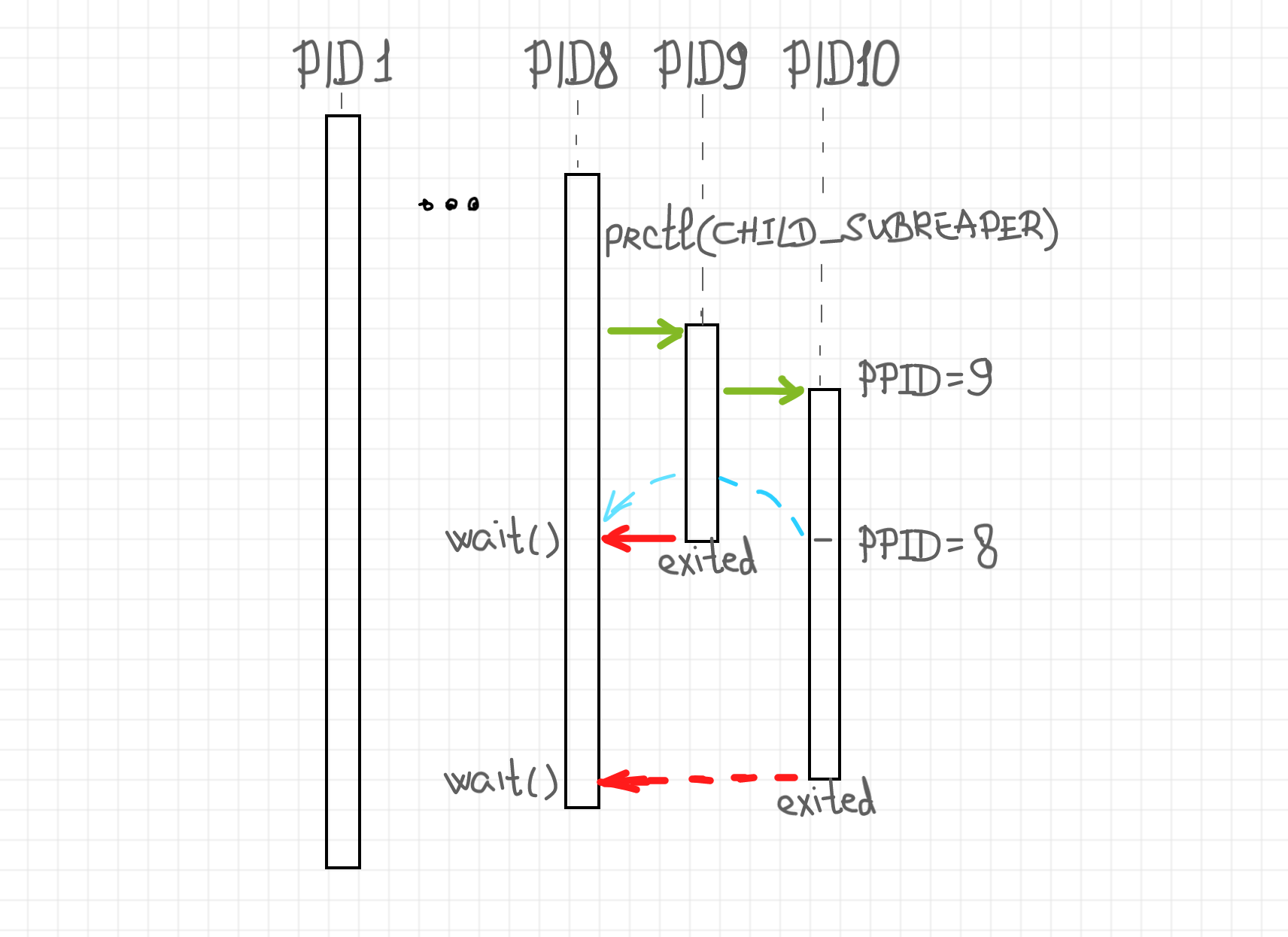
The implementation of this trick is as simple as a single prctl() invocation. This system call is an almighty tool when it comes to process behavior tuning. Let's try to make a workable example:
use std::process::{exit};
use std::thread::{sleep};
use std::time::Duration;
use libc::{prctl, PR_SET_CHILD_SUBREAPER};
use nix::sys::wait::waitpid;
use nix::unistd::{fork, ForkResult, getpid, getppid, Pid};
fn main() {
println!("[main] Hi there! My PID is {}.", getpid());
println!("[main] Making myself a child subreaper.");
unsafe {
prctl(PR_SET_CHILD_SUBREAPER, 1, 0, 0, 0);
}
match fork() {
Ok(ForkResult::Child) => {
//////////////////////
// child 1 //
//////////////////////
println!("[child 1] I'm alive! My PID is {} and PPID is {}.", getpid(), getppid());
match fork() {
Ok(ForkResult::Child) => {
//////////////////////
// child 2 //
//////////////////////
for _ in 0..6 {
println!("[child 2] I'm alive! My PID is {} and PPID is {}.", getpid(), getppid());
sleep(Duration::from_millis(500));
}
println!("[child 2] Bye Bye");
exit(0);
}
Ok(ForkResult::Parent { child, .. }) => {
println!("[child 1] I forked a grandchild with PID {}.", child);
}
Err(err) => panic!("[child 1] fork() failed: {}", err),
};
println!("[child 1] I'm gonna sleep for a while and then just exit...");
sleep(Duration::from_millis(1500));
exit(0);
}
Ok(ForkResult::Parent { child, .. }) => {
println!("[main] I forked a child with PID {}.", child);
}
Err(err) => panic!("[main] fork() failed: {}", err),
};
println!("[main] I'll be waiting for the child termination...");
match waitpid(Pid::from_raw(-1), None) {
Ok(status) => println!("[main] Child exited with status {:?}", status),
Err(err) => println!("[main] waitpid() failed: {}", err),
}
println!("[main] I'll be waiting for the grandchild termination as well...");
sleep(Duration::from_millis(500)); // just in case
match waitpid(Pid::from_raw(-1), None) {
Ok(status) => println!("[main] Grandchild exited with status {:?}", status),
Err(err) => println!("[main] waitpid() failed: {}", err),
}
println!("[main] Bye Bye!");
}
Run the full version using cargo run --bin subreaper.
The idea is pretty simple again. The main process forks a child which, in turn, forks its own child, i.e. a grandchild of the main process. The grandchild continuously reports its parent id. In a while, the child process exits and since the main process marked itself a subreaper, the grandchild gets reparented to the main process instead of the init process. The following output produced by the program proves it:
[main] Hi there! My PID is 6851.
[main] Making myself a child subreaper.
[main] I forked a child with PID 6893.
[main] I'll be waiting for the child termination...
[child 1] I'm alive! My PID is 6893 and PPID is 6851.
[child 1] I forked a grandchild with PID 6894.
[child 2] I'm alive! My PID is 6894 and PPID is 6893.
[child 1] I'm gonna sleep for a while and then just exit...
[child 2] I'm alive! My PID is 6894 and PPID is 6893.
[child 2] I'm alive! My PID is 6894 and PPID is 6893.
[child 2] I'm alive! My PID is 6894 and PPID is 6893.
[main] Child exited with status Exited(Pid(6893), 0)
[main] I'll be waiting for the grandchild termination as well...
[child 2] I'm alive! My PID is 6894 and PPID is 6851.
[child 2] I'm alive! My PID is 6894 and PPID is 6851.
[child 2] Bye Bye
[main] Grandchild exited with status Exited(Pid(6894), 0)
[main] Bye Bye!
Catching the parent process termination
Well, we already know, that a parent process gets notified by the kernel on its children's status change via SIGCHLD signal, even though the default action for this signal is just to ignore it. But can a child process catch its parent termination? Apparently yes, but some extra effort is required. Calling prctl() with the PR_SET_PDEATHSIG flag in the child process allows us to register a signal that will be sent to the child process on its parent death. We can use an arbitrary signal number as a second argument to the prctl() call. For instance, invoking prctl(PR_SET_PDEATHSIG, SIGKILL) will lead to the child process termination as well. We also can use a harmless signal, like SIGUSR1 with a custom handler.
Now, let's try to put together all the things we've learned today. First, we will make a program catching its parent termination:
use std::ffi::{c_void};
use std::thread;
use std::time::Duration;
use libc::{prctl, PR_SET_PDEATHSIG, STDOUT_FILENO, write};
use nix::sys::signal::{sigaction, SaFlags, SigAction, SigHandler, SigSet, SIGUSR1};
use nix::unistd::{getpid, getppid, Pid};
extern "C" fn handle_sigusr1(_: libc::c_int) {
print_signal_safe("[sleepy] Parent died!\n");
}
fn main() {
println!("[sleepy] Hi there! My pid is {}", getpid());
println!("[sleepy] Binding SIGUSR1 to the parent termination event");
unsafe {
prctl(PR_SET_PDEATHSIG, SIGUSR1);
}
let sig_action = SigAction::new(
SigHandler::Handler(handle_sigusr1),
SaFlags::empty(),
SigSet::empty(),
);
if let Err(err) = unsafe { sigaction(SIGUSR1, &sig_action) } {
println!("[sleepy] sigaction() failed: {}", err);
};
loop {
let ppid = getppid();
println!("[sleepy] My parent is {}. Zzzz...", ppid);
thread::sleep(Duration::from_millis(500));
if ppid == Pid::from_raw(1) {
println!("[sleepy] My parent is init process. I don't like it much...");
break;
}
}
println!("[sleepy] Bye Bye!");
}
fn print_signal_safe(s: &str) {
unsafe {
write(STDOUT_FILENO, s.as_ptr() as (* const c_void), s.len());
}
}
Run the full version using cargo run --bin sleepy.
And now we will just exec() this program in a grandchild process while making our main process a child subreaper:
use std::ffi::CString;
use std::process::{exit};
use std::thread::{sleep};
use std::time::Duration;
use libc::{prctl, PR_SET_CHILD_SUBREAPER};
use nix::sys::wait::waitpid;
use nix::unistd::{execv, fork, ForkResult, getpid, getppid, Pid};
fn main() {
println!("[main] Hi there! My pid is {}", getpid());
println!("[main] Making myself a child subreaper.");
unsafe {
prctl(PR_SET_CHILD_SUBREAPER, 1, 0, 0, 0);
}
match fork() {
Ok(ForkResult::Parent { child, .. }) => {
println!("[main] Forked new child with pid {}", child);
}
Ok(ForkResult::Child) => {
//////////////////////
// child 1 //
//////////////////////
println!("[child 1] I'm alive! My PID is {} and PPID is {}.", getpid(), getppid());
match fork() {
Ok(ForkResult::Child) => {
//////////////////////
// child 2 //
//////////////////////
println!("[child 2] I'm alive! My PID is {} and PPID is {}.", getpid(), getppid());
println!("[child 2] Exec-ing...");
exec_or_die("target/debug/sleepy");
}
Ok(ForkResult::Parent { child, .. }) => {
println!("[child 1] I forked a child with PID {}.", child);
}
Err(err) => panic!("[child 1] fork failed: {}", err),
}
println!("[child 1] I'm gonna sleep for a while and then just exit...");
sleep(Duration::from_millis(1500));
exit(0);
}
Err(err) => panic!("main: fork failed: {}", err),
};
println!("[main] I'll be waiting for the child termination...");
match waitpid(Pid::from_raw(-1), None) {
Ok(status) => println!("[main] Child exited with status {:?}", status),
Err(err) => println!("[main] waitpid() failed: {}", err),
}
println!("[main] I'll not be waiting for the grandchild though.");
sleep(Duration::from_millis(1000));
println!("[main] Bye Bye!");
}
fn exec_or_die(name: &str) {
let name_cstr = CString::new(name).unwrap();
match execv(&name_cstr, &vec![name_cstr.clone()]) {
Ok(_) => unreachable!("execv() succeed! Wait, what?!"),
Err(err) => unreachable!("execv() failed: {}", err),
}
}
Run the full version using cargo run --bin combined.
If we build the sleepy.rs and then launch the combined.rs, they will produce the following combined output:
[main] Hi there! My pid is 7241
[main] Making myself a child subreaper.
[main] Forked new child with pid 7243
[main] I'll be waiting for the child termination...
[child 1] I'm alive! My PID is 7243 and PPID is 7241.
[child 1] I forked a child with PID 7244.
[child 1] I'm gonna sleep for a while and then just exit...
[child 2] I'm alive! My PID is 7244 and PPID is 7243.
[child 2] Exec-ing...
[sleepy] Hi there! My pid is 7244
[sleepy] Binding SIGUSR1 to the parent termination event
[sleepy] My parent is 7243. Zzzz...
[sleepy] My parent is 7243. Zzzz...
[sleepy] My parent is 7243. Zzzz...
[sleepy] Parent died!
[main] Child exited with status Exited(Pid(7243), 0)
[main] I'll not be waiting for the grandchild though.
[sleepy] My parent is 7241. Zzzz...
[sleepy] My parent is 7241. Zzzz...
[main] Bye Bye!
[sleepy] Parent died!
[sleepy] My parent is 1. Zzzz...
[sleepy] My parent is init process. I don't like it much...
[sleepy] Bye Bye!
Instead of conclusion
There is usually little motivation to study such basic topics as Linux processes. However, only having sufficient fundamental knowledge we can build reliable higher-level software. I realized it once again on my journey to implementing a container runtime shim as a part of the educational container manager project. There's plenty of books about Linux/Unix programming, but my favorite book so far is Advanced Programming in the Unix Environment. It's a comprehensive but still easy digestible resource with very reasonably ordered chapters. So, if you are interested in the topic, I strongly advise to check it out.
The full version of the source code in the article can be found on my GitHub.
Level up your server-side game — join 20,000 engineers getting insightful learning materials straight to their inbox:
